 Raspberry Pi Jam “Chaos Car!”
Raspberry Pi Jam “Chaos Car!”Raspberry Pi 1
+ battery pack
+ Bluetooth USB dongle
+ i-racer bluetooth car
+ Raspberry Pi camera
+ some Python code
+ loads of sellotape
=
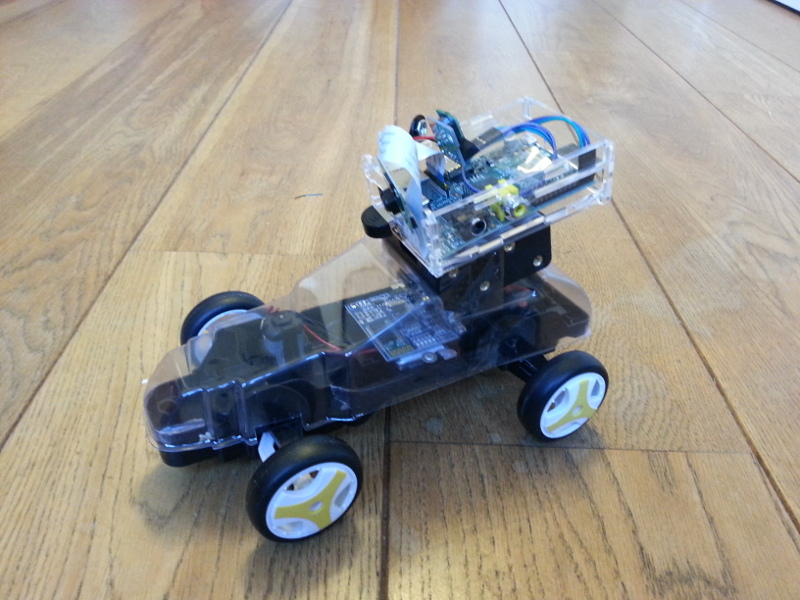
Chaos car!
Here’s the code:
#!/usr/bin/env python2
import os
import random
import bluetooth
import sys
import time
car_name = "DaguCar"
def find_car_mac( car_name ):
ret = None
print "Scanning for a device called %s..." % car_name
devices = bluetooth.discover_devices()
for addr in devices:
dev_name = bluetooth.lookup_name( addr )
if dev_name == car_name:
print "Car found! (MAC=%s)" % addr
time.sleep( 1 )
return addr
else:
print "Skipping device named '%s'." % dev_name
sys.stderr.write( "Couldn't find a device called %s!\n" % car_name )
sys.exit( 1 )
#car_mac = find_car_mac( car_name )
print "Using hard-coded MAC address"
car_mac = "20:13:04:23:05:71"
print "Connecting to the car at %s..." % car_mac
sock = bluetooth.BluetoothSocket( bluetooth.RFCOMM )
sock.connect( ( car_mac, 1 ) )
class Car:
def turn_right(self):
print("looking right")
sock.send( '\x6A' )
def turn_left(self):
print("looking left")
sock.send( '\x5A' )
def roll_forward(self):
print("watch out in front coming forward")
sock.send( '\x1A' )
def roll_backward(self):
print("beep beep going backward")
sock.send( '\x2A' )
def wait(self):
print("waiting")
sock.send( '\x00' )
car = Car()
instruction = ["turn right", "turn left", "roll forward", "roll backward", "wait"]
while True:
ci = random.choice(instruction)
if ci == "turn right":
car.turn_right()
elif ci == "turn left":
car.turn_left()
elif ci == "roll forward":
car.roll_forward()
elif ci == "roll backward":
car.roll_backward()
elif ci == "wait":
car.wait()
time.sleep(0.5)
Improving the code to avoid bumping into walls is left as an exercise for the reader.
One thought on “Raspberry Pi Jam “Chaos Car!””